
Benjamins software application enables these lorries to disperse in an ideal distribution for the part of the ocean in which they are running.
Fluid characteristics, altering tides, weather condition patterns, and climate modification make the ocean an unforeseeable environment that is various from one minute to the next.” You cant account for every molecule of water in the ocean when developing designs. The resolution and precision of designs, and the ocean measurements are restricted. There might be a model data point every 100 meters, every kilometer, or, if you are looking at environment designs of the international ocean, you may have a data point every 10 kilometers or so.
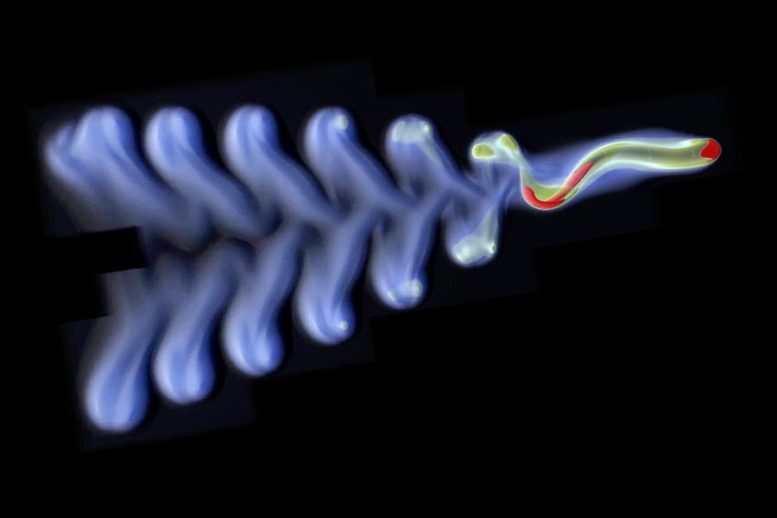
Assistant Professor Wim van Rees and his group have actually developed simulations of self-propelled undulatory swimmers to much better comprehend how fish-like deformable fins might enhance propulsion in underwater devices, seen here in a top-down view. Credit: Image thanks to MIT van Rees Lab
MIT ocean and mechanical engineers are using advances in clinical computing to address the oceans lots of difficulties, and take its opportunities.
There are few environments as unforgiving as the ocean. Its unpredictable weather patterns and restrictions in regards to interactions have actually left big swaths of the ocean untouched and shrouded in secret.
” The ocean is an interesting environment with a number of present obstacles like microplastics, algae blooms, coral whitening, and increasing temperatures,” says Wim van Rees, the ABS Career Development Professor at MIT. “At the exact same time, the ocean holds numerous chances– from aquaculture to energy harvesting and exploring the many ocean animals we havent found yet.”
Ocean engineers and mechanical engineers, like van Rees, are using advances in scientific computing to deal with the oceans numerous obstacles, and seize its opportunities. These scientists are establishing technologies to much better understand our oceans, and how both organisms and human-made cars can move within them, from the micro scale to the macro scale.
Assistant Professor Wim van Rees and his group have actually developed simulations of self-propelled undulatory swimmers to better understand how fish-like deformable fins might improve propulsion in underwater devices, seen here as two fish side-by-side. Credit: Image thanks to MIT van Rees Lab
Bio-inspired undersea gadgets
A detailed dance occurs as fish dart through water. Flexible fins flap within currents of water, leaving a path of eddies in their wake.
” Fish have detailed internal musculature to adjust the accurate shape of their bodies and fins. This enables them to move themselves in many various ways, well beyond what any man-made car can do in terms of maneuverability, agility, or adaptivity,” discusses van Rees.
According to van Rees, thanks to advances in additive manufacturing, optimization methods, and maker knowing, we are more detailed than ever to duplicating morphing and versatile fish fins for use in undersea robotics. As such, there is a greater need to comprehend how these soft fins effect propulsion.
Van Rees and his team are developing and utilizing numerical simulation methods to check out the style space for underwater devices that have an increase in degrees of flexibility, for instance due to fish-like, deformable fins.
College student Abhinav Gupta and Professor Pierre Lermusiaux have actually established a new machine discovering structure to help offset the absence of resolution or precision in existing dynamical system designs. Their structure can be utilized for a variety of applications, including enhanced predictions of Loop Current eddies around oil well in the Gulf of Mexico. Credit: Image courtesy of the MIT MSEAS Lab
These simulations assist the group much better understand the interplay in between the fluid and structural mechanics of fishs soft, flexible fins as they move through a fluid flow. As an outcome, they are able to much better understand how fin shape contortions can hurt or enhance swimming performance. “By developing accurate mathematical techniques and scalable parallel implementations, we can utilize supercomputers to fix exactly what takes place at this user interface between the circulation and the structure,” adds van Rees.
Through combining his simulation algorithms for versatile underwater structures with optimization and artificial intelligence strategies, van Rees aims to establish an automated design tool for a brand-new generation of autonomous undersea gadgets. This tool might assist engineers and designers develop, for example, robotic fins and undersea cars that can wisely adjust their shape to better attain their instant operational objectives– whether its swimming faster and more efficiently or carrying out navigating operations.
” We can utilize this optimization and AI to do inverse style inside the entire specification area and develop wise, adaptable devices from scratch, or use precise specific simulations to identify the physical concepts that figure out why one shape carries out much better than another,” describes van Rees.
Swarming algorithms for robotic vehicles
Like van Rees, Principal Research Scientist Michael Benjamin desires to enhance the way cars steer through the water. This optimization method, developed by Benjamin during his PhD work, enables a vehicle to autonomously choose the heading, instructions, depth, and speed it should go in to attain several synchronised goals.
Michael Benjamin has actually developed swarming algorithms that make it possible for uncrewed cars, like the ones visualized, to disperse in an optimum circulation and prevent accidents. Credit: Michael Benjamin
Now, Benjamin is taking this innovation a step even more by developing swarming and obstacle-avoidance algorithms. These algorithms would enable lots of uncrewed automobiles to interact with one another and check out a provided part of the ocean.
To begin, Benjamin is taking a look at how to best disperse autonomous automobiles in the ocean.
” Lets expect you wish to introduce 50 vehicles in an area of the Sea of Japan. We would like to know: Does it make sense to drop all 50 automobiles at one area, or have a mothership drop them off at specific points throughout a provided location?” describes Benjamin.
He and his team have established algorithms that address this question. Utilizing swarming innovation, each automobile periodically communicates its area to other automobiles close by. Benjamins software application makes it possible for these lorries to disperse in an ideal distribution for the portion of the ocean in which they are operating.
Central to the success of the swarming lorries is the ability to prevent crashes. Collision avoidance is made complex by worldwide maritime rules called COLREGS– or “Collision Regulations.” These rules determine which lorries have the “right of method” when crossing paths, posturing a distinct obstacle for Benjamins swarming algorithms.
The COLREGS are composed from the viewpoint of preventing another single contact, however Benjamins swarming algorithm needed to account for numerous unpiloted cars trying to prevent hitting one another.
To tackle this problem, Benjamin and his group developed a multi-object optimization algorithm that ranked specific maneuvers on a scale from zero to 100. A no would be a direct crash, while 100 would suggest the automobiles entirely avoid collision.
” Our software is the only marine software where multi-objective optimization is the core mathematical basis for decision-making,” says Benjamin.
While researchers like Benjamin and van Rees use device knowing and multi-objective optimization to attend to the complexity of cars moving through ocean environments, others like Pierre Lermusiaux, the Nam Pyo Suh Professor at MIT, use machine finding out to better understand the ocean environment itself.
Improving ocean modeling and forecasts
Oceans are perhaps the very best example of whats understood as a complicated dynamical system. Fluid characteristics, altering tides, weather condition patterns, and environment change make the ocean an unpredictable environment that is different from one moment to the next. The ever-changing nature of the ocean environment can make forecasting extremely tough.
Researchers have actually been utilizing dynamical system models to make forecasts for ocean environments, but as Lermusiaux discusses, these designs have their limitations.
” You cant account for every molecule of water in the ocean when developing models. The resolution and accuracy of models, and the ocean measurements are restricted. There could be a design information point every 100 meters, every kilometer, or, if you are taking a look at climate models of the worldwide ocean, you might have an information point every 10 kilometers approximately. That can have a big effect on the precision of your forecast,” describes Lermusiaux.
Graduate student Abhinav Gupta and Lermusiaux have actually established a brand-new machine-learning structure to help make up for the absence of resolution or precision in these models. Their algorithm takes a basic model with low resolution and can fill out the gaps, imitating a more precise, complicated design with a high degree of resolution.
For the first time, Gupta and Lermusiauxs framework finds out and introduces dead time in existing approximate designs to enhance their predictive abilities.
” Things in the natural world do not take place instantly; nevertheless, all the widespread models presume things are taking place in real time,” states Gupta. “To make an approximate model more accurate, the device learning and data you are inputting into the equation requirement to represent the effects of previous states on the future prediction.”
The groups “neural closure design,” which accounts for these hold-ups, might possibly result in improved forecasts for things such as a Loop Current eddy hitting an oil rig in the Gulf of Mexico, or the amount of phytoplankton in a given part of the ocean.
As computing technologies such as Gupta and Lermusiauxs neural closure design continue to advance and improve, scientists can start unlocking more of the oceans mysteries and develop solutions to the lots of obstacles our oceans deal with.
By Mary Beth Gallagher, MIT Department of Mechanical Engineering
January 22, 2022