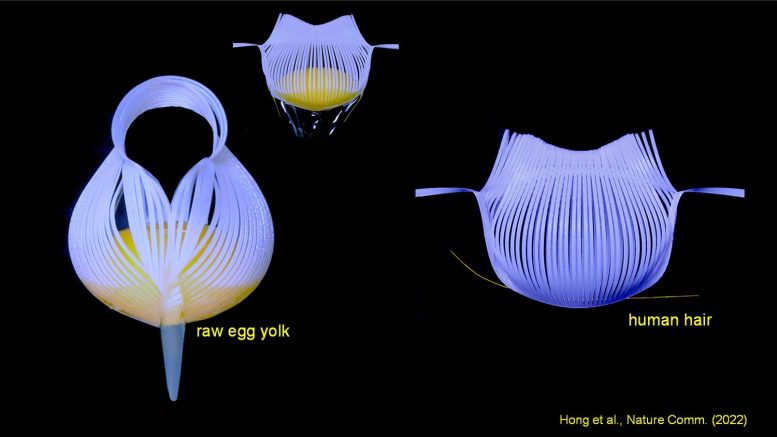
Engineering researchers from North Carolina State University have actually demonstrated a brand-new type of versatile, robotic grippers that have the ability to lift fragile egg yolks without breaking them, and that are exact enough to lift a human hair. Credit: Jie Yin, North Carolina State University
Engineering scientists from North Carolina State University have shown a new type of flexible, robotic grippers that are able to raise fragile egg yolks without breaking them, which are accurate adequate to raise a human hair. The work has applications for both biomedical innovations and soft robotics.
The work draws on the art of kirigami, which involves both cutting and folding two-dimensional (2D) sheets of product to form three-dimensional (3D) shapes. Particularly, the researchers have actually established a new method that involves using kirigami to transform 2D sheets into curved 3D structures by cutting parallel slits throughout much of the product. The final shape of the 3D structure is identified in big part by the external border of the material. For instance, a 2D product that has a circular border would form a round 3D shape.
” We have defined and showed a design that allows users to work in reverse,” states Yaoye Hong, first author of a paper on the work and a Ph.D. trainee at NC State. “If users know what sort of curved, 3D structure they need, they can use our approach to determine the limit shape and pattern of slits they require to use in the 2D material. And extra control of the last structure is enabled by controlling the instructions in which the material is pressed or pulled.”
Specifically, the scientists have actually established a new method that includes using kirigami to convert 2D sheets into curved 3D structures by cutting parallel slits across much of the material.” We have defined and showed a model that permits users to work in reverse,” states Yaoye Hong, very first author of a paper on the work and a Ph.D. trainee at NC State. Our grippers basically surround an object and then lift it– comparable to the method we cup our hands around a things.” This is proof-of-concept work that shows our method works,” Yin states. The paper is co-authored by Yong Zhu, the Andrew A. Adams Distinguished Professor of Mechanical and Aerospace Engineering at NC State; and by Yinding Chi, Shuang Wu, Yanbin Li, all of whom are Ph.D. students at NC State.
” Our strategy is a fair bit simpler than previous strategies for transforming 2D products into curved 3D structures, and it permits designers to create a variety of tailored structures from 2D products,” states Jie Yin, corresponding author of the paper and an associate professor of mechanical and aerospace engineering at NC State.
The scientists demonstrated the utility of their technique by producing grippers efficient in getting and lifting objects ranging from egg yolks to a human hair.
” Weve shown that our technique can be utilized to create tools efficient in comprehending and moving even extremely delicate things,” Yin states.
” Conventional grippers grasp an object strongly– they get things by putting pressure on them,” Yin says. Our grippers basically surround an item and then raise it– similar to the method we cup our hands around an item.
However, the researchers note that there are a host of other prospective applications, such as using the strategy to create biomedical innovations that comply with the shape of a joint– like the human knee.
” Think of wise plasters or keeping an eye on devices capable of moving and bending with your knee or elbow,” Yin states.
” This is proof-of-concept work that reveals our technique works,” Yin states. “Were now in the procedure of incorporating this strategy into soft robotics technologies to deal with commercial obstacles. We are likewise exploring how this method might be utilized to produce devices that might be used to apply heat to the human knee, which would have restorative applications.
” Were open to dealing with market partners to explore extra applications and to find ways to move this approach from the lab into practical usage.”
Recommendation: “Boundary curvature directed programmable shape-morphing kirigami sheets” by Yaoye Hong, Yinding Chi, Shuang Wu, Yanbin Li, Yong Zhu and Jie Yin, 26 January 2022, Nature Communications.DOI: 10.1038/ s41467-022-28187-x.
The paper will be released in the journal Nature Communications on January 26. The paper is co-authored by Yong Zhu, the Andrew A. Adams Distinguished Professor of Mechanical and Aerospace Engineering at NC State; and by Yinding Chi, Shuang Wu, Yanbin Li, all of whom are Ph.D. students at NC State. The work was made with assistance from the National Science Foundation under grants 2005374 and 2013993.